Procédure d’inspection des pales
🎯 Objectifs d'Apprentissage
À la fin de ce chapitre, vous serez capable de :
- Comprendre le processus d’inspection en deux phases : calibration et vol automatique
- Expliquer le but et les exigences de la calibration à 6 points
- Identifier la distance de sécurité critique (minimum 3m)
- Reconnaître les sources d’erreurs de trajectoire (dérive GPS, baromètre, erreurs de calibration)
- Comprendre pourquoi certains moments du vol nécessitent une vigilance accrue
⏱️ Temps estimé : 12-15 minutes
Vue d’ensemble
Maintenant que nous avons vu comment contrôler les paramètres de la caméra, plongeons dans la procédure réelle ! L’inspection se déroule en deux étapes :
- la calibration (en vol manuel)
- le vol automatique
Calibration
Cette première étape est nécessaire pour construire un modèle 3D de la turbine. Ici, le pilote doit faire voler le drone manuellement, vers 6 points différents devant la turbine : 3 sur le hub et 3 sur le bout des pales.
Pour capturer le point de calibration, déplacez le drone devant la turbine, puis visez le bon endroit et rapprochez le drone, à moins de 5 mètres. Sur le hub, les points doivent être à environ 1m de l’anneau (la base de la pale). Sur le bout, visez environ 1-2m de la pointe réelle, sinon les capteurs ne détecteront pas la pale.
⚠️ Important
Quiz
Quel est le but de la phase de calibration ?
Réponse unique
Quelle est la distance maximale pour effectuer la calibration ?
Réponse unique
Pourquoi est-il important d’avoir des points de calibration précis ?
Réponses multiples
Trajectoires
Une fois la calibration terminée, le modèle 3D de la turbine est généré et une trajectoire d’inspection est calculée. Le drone vole ensuite le long de cette trajectoire tout en capturant des images en continu. Il est important de noter que la trajectoire est une ligne droite et ne suit pas exactement la forme courbée de la pale. Par conséquent, la distance entre le drone et la pale variera le long du chemin de vol. Pour cette raison, le pilote peut avoir besoin d’ajuster légèrement la distance de vol pendant l’inspection pour compenser la courbure de la pale et maintenir une qualité d’image optimale.
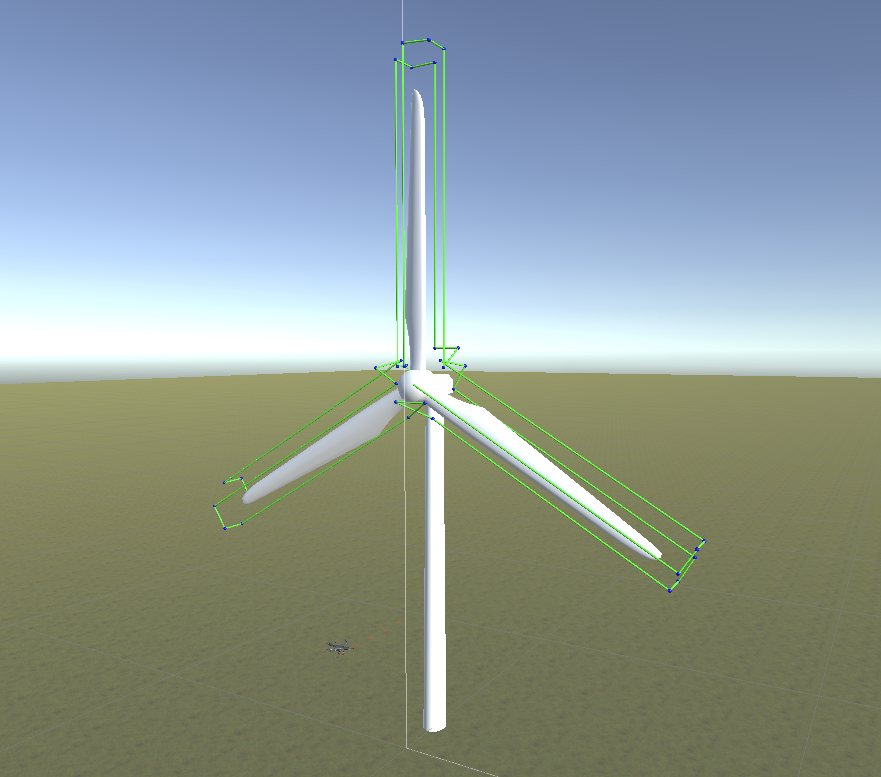
Regardons cela plus en détail. Voici un aperçu du vol automatique.
Quiz
Quelle est la logique de séquence d’inspection pendant le vol automatique ?
Réponse unique
Pourquoi le drone ne devrait-il jamais être à moins de 3 mètres de la turbine ?
Réponses multiples
💡 Règle de Sécurité Critique
Que se passe-t-il si les points de calibration du hub sont placés incorrectement (trop espacés ou trop proches) ?
Réponse unique
Parce que la trajectoire est calculée uniquement sur la base des points de calibration, de petites erreurs peuvent entraîner une trajectoire mal formée. Par exemple, si les points HubLeft et HubRight sont pris trop espacés, le drone ne prendra pas de photos jusqu’à la base de la pale, surtout en dessous.
Voici un exemple où le point HubTop a été pris avec un angle (pas en regardant droit devant la turbine).
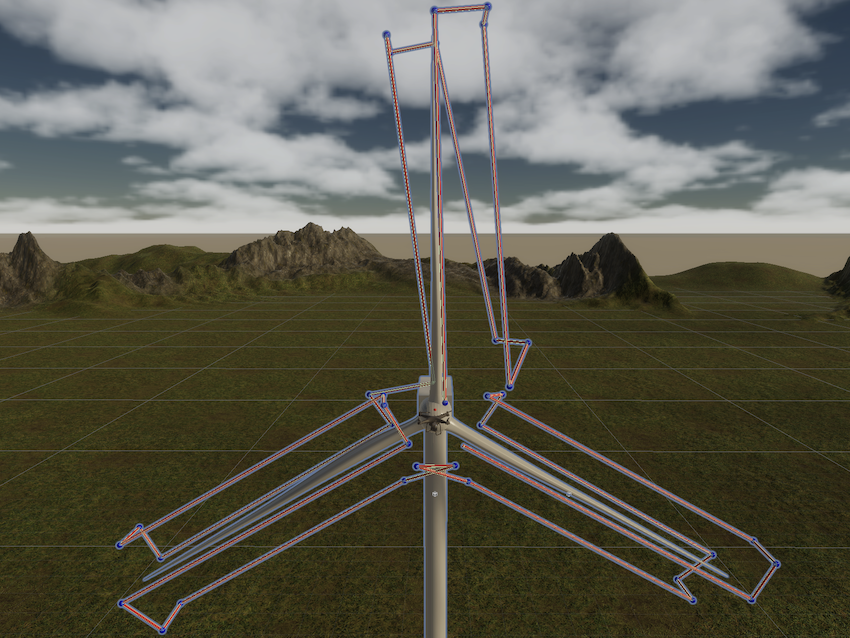
Et ici les points ont été pris trop près du hub.
| HubLeft | HubRight |
|---|---|
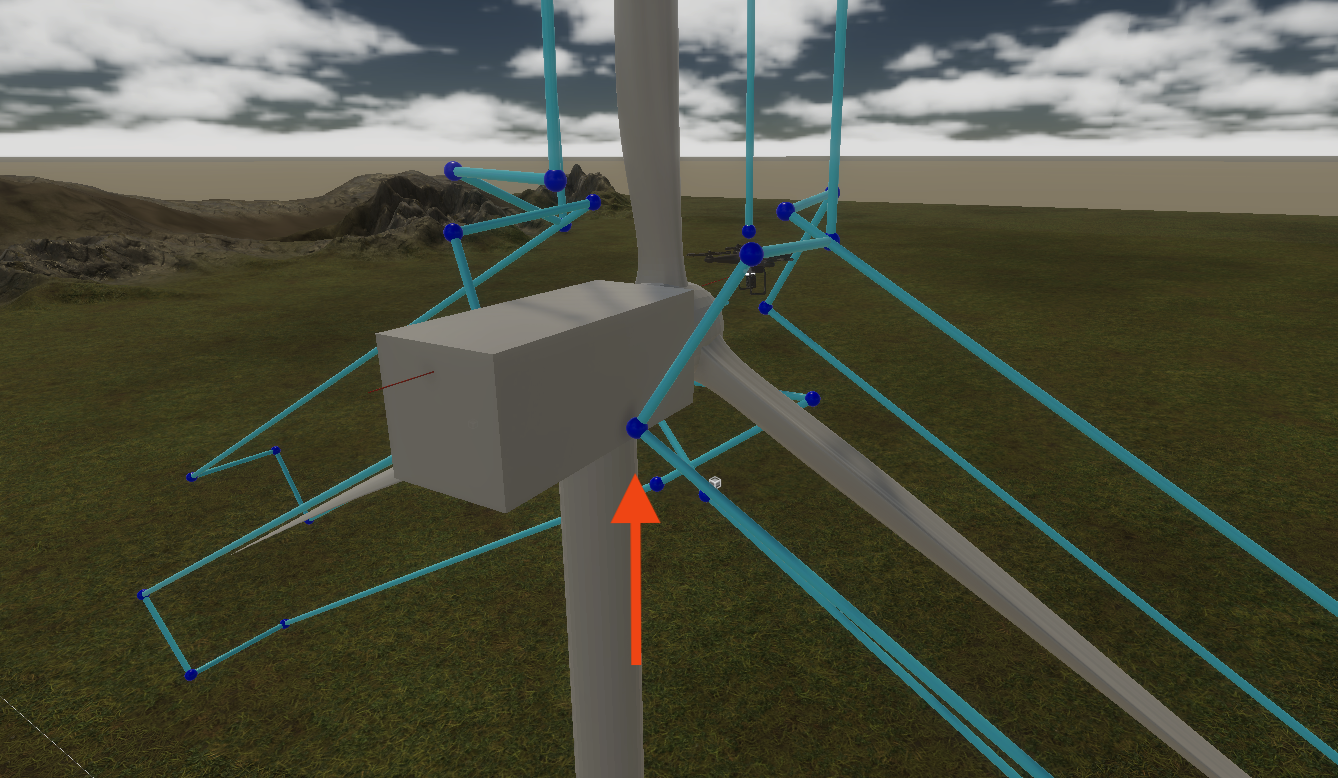
 |  |
Sur la trajectoire, nous observons qu’elle se rapproche vraiment de la nacelle, la touchant presque : le drone entrerait en collision s’il suivait cette trajectoire.
Quiz
Quelle est la distance minimale entre le drone et la turbine ?
Réponse unique
Pourquoi certains points pendant le vol sont-ils considérés critiques (par ex., début Left TE, transitions de pale) ?
Réponses multiples
Quelles informations les capteurs de distance fournissent-ils pendant l’inspection ?
Réponse unique
⚠️ Comprendre les Limites des Capteurs
Quiz
Quelles sont les principales sources d’erreurs de trajectoire pendant le vol automatique ?
Réponses multiples
Pourquoi le GPS a-t-il une précision limitée pour le positionnement du drone ?
Réponse unique
Quel facteur atmosphérique peut affecter la lecture d’altitude du baromètre ?
Réponse unique
✅ Résumé du Chapitre
Excellent travail ! Vous comprenez maintenant la procédure d’inspection des pales. Récapitulons les points essentiels :
🎯 Points Clés à Retenir
Processus d’inspection en deux phases :
- Calibration : Vol manuel vers 6 points (3 hub + 3 bouts) à <5m de distance
- Vol automatique : Le drone suit la trajectoire calculée en prenant des photos.
Exigences de calibration :
- Points du hub : ~1m de l’anneau de la pale
- Points des bouts de pâle : 1-2m du bout réelle
- Distance maximale : 5m (peut être plus proche, minimum 3m)
Distance de sécurité : Ne jamais descendre en dessous de 3 mètres de la turbine
Caractéristiques de la trajectoire :
- Calculée à partir des points de calibration
- Ligne droite (ne suit pas la courbure de la pale)
- La distance varie le long du chemin de vol
- Erreurs de calibration = trajectoire mal formée
Sources d’erreurs de trajectoire :
- Dérive GPS (précision de ±1,5m)
- Variations de pression atmosphérique du baromètre
- Points de calibration mal placés
Moments de vol critiques nécessitant une vigilance :
- Transitions entre les pales
- Près de la nacelle (début Left TE, fin Right TE)
- Manœuvres entre les pales
💭 Avant de continuer…
Assurez-vous de comprendre :
- Pourquoi la précision de la calibration est critique pour un vol sûr
- La règle de sécurité des 3 mètres et quand elle est la plus à risque
- Comment les limites des capteurs peuvent causer une dérive de trajectoire
Prêt à apprendre sur les corrections de vol ? Chapitre suivant !